Biyolojik Robotlar Geliştiriliyor
 Admin
Admin
Uzun süredir mühendisler yaşamı taklit etmeye çalışıyorlar. İnsan beynine modelledirilmiş makine öğrenimi algoritmaları geliştirdiler, köpekler gibi yürüyen veya böcekler gibi uçan makineler tasarladılar ve robotlara çevrelerine uyum sağlamayı öğrettiler, ancak şimdi taklit etmeyi tamamen bırakıyorlar.
Biyolojiden ilham almak yerine, canlı hücrelerden oluşan küçük, serbest yüzme asambleleri inşa ediyorlar ve bunlar kendiliğinden yönlendirilen sistemlere dönüşüyor. Sonuç olarak, araştırmacılar "nörobot" olarak adlandırdıkları bir şey ortaya çıkıyor. Bu canlı makineler, bilim insanlarının basit sinir ağlarının nasıl kompleks davranışlara yol açtığını daha iyi anlamalarına yardımcı olabilir ve bu da biyolojik doku ile mühendislik kontrolünün entegre edildiği siborg sistemlerinin temel bir adımı olabilir. Ayrıca, daha da geliştirildiklerinde, precisyon doku onarımı veya çevre temizliği gibi uygulamalarda kullanılabilecekler.
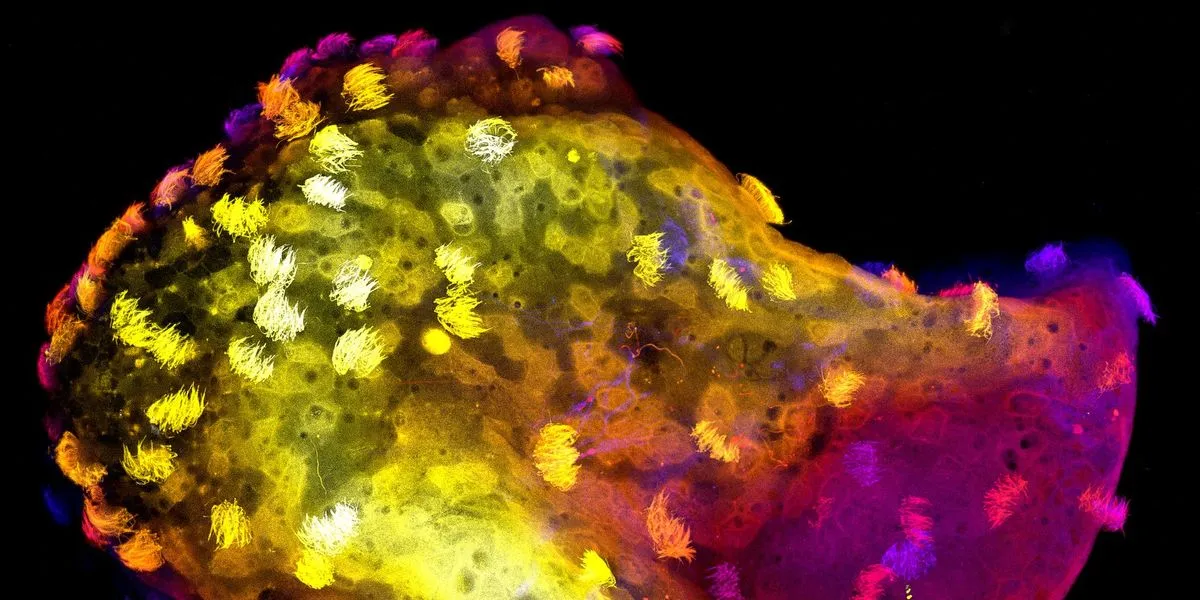
University of Minnesota Twin Cities'ten sentetik biyolog Kate Adamala, "Genel tepkim, 'Vay, bu muhteşem!' " diyor. "Bu gerçekten bio-mühendisliğin mühendislik bileşenini getiriyor." Tufts Üniversitesi biyologu Michael Levin ve işbirlikçileri tarafından geliştirilen biyolojik makinelerin bir dizi gelişmiş versiyonunun en son aşaması nörobotlar. İlk olarak 2020'de tanımlanan bu canlı hücre kümeleri, normal gelişim bağlamından çıkarıldıklarında ve basit tuzlu koşullarda yetiştirildiklerinde, kendiliğinden organize oluyorlar ve yeni şekillerde hareket ediyorlar. Mikroskop altında, düzensiz, saydam doku topları gibi görünüyorlar, ancak koordine hareketleri, doğal dünyada bulunan her şeye benzemeyen bir ortaya çıkan düzeni ortaya koyuyor. Binghamton Üniversitesi, New York Eyalet Üniversitesi'nden bilgisayar bilimcisi Carlos Gershenson, "Bu şeyler doğal olarak oluşmuyor" diyor. "Doğal hücrelerle yapılıyor, ancak biz onları düzenleyenleriz."
İlk olarak 2020'de tanımlanan bu biyolojik makinelerin en eski örnekleri, kurbağa dokularından inşa edilmiş ve chủ olarak tek bir tür yapısal hücreden oluşuyordu. Ancak, basit yapısına rağmen, bunlar su içinde cilialar kullanarak kendilerini itebilirler, birkaç gün boyunca ek besin maddeleri olmadan hayatta kalabilirler ve herhangi bir iskele malzemesi veya genetik manipülasyon olmadan küçük hasarları onarabilirler. Bazıları даже kendiliğinden serbest stem hücreleri süpürerek self-replikasyon yapabilir. Ancak, bu biyolojik makinelerin davranışları esasen mekanikti. Hareketleri anatomiden ve fizikten kaynaklanıyordu, iç kontrolün bir benzeri değildi. Kimyasal ipuçlarını algılayabilir, buna göre yön değiştirebilir ve geçmiş deneyimleri izlerini koruyabilir, ancak birçok basit organizma - mantarlar, protistler ve bakteriler dahil - aynı şeyi yapabilir. Daha esnek, koordine davranış için, vücut boyunca bilgi entegre etme ve eylemlerini dinamik olarak yönlendirme yolu bulmaları gerekiyordu. Nörobotlar bu eksik kontrol katmanını sağlamaya başlıyor.
Nörobotlar, önceki xenobotlara benzer şekilde, kurbağa hücrelerinden inşa ediliyor, ancak şimdi kısmen farklılaşmış kök hücrelerden olgunlaşan nöronlarla donatılmışlar. Bu sinir hücreleri, yapısal dokularla birlikte gelişiyor ve otonom varlıklar boyunca dallanmış bağlantılar oluşturuyor. Bu, hücreden hücreye elektrokimyasal sinyaller iletmelerine olanak tanıyor. Diğer laboratuvar modelleri gibi beyin organoidleri veya laboratuvar-çip teknolojileri - nörobotlar hareket ediyor. Yüzerler, keşfederler ve çevrelerine tepki verirler, bu da elektriksel sinyalleme ile gözlemlenebilir hareket arasında bir bağ oluşturur ve fiziksel aktivite desenleri üretir. Nörobotlar, boşta geçirilen süreyi azaltır ve keşfetme süresini artırır. Ayrıca, basit yörüngeleri tekrarlamak yerine, döngüsel ve spiral yollar izlerler ve nöroaktif ilaçlara farklı şekilde tepki verirler. Bu iç yönlendirilen hareketlerin ve reflekslerin düzenleyici ilkeleri şimdi çözülebilirse, daha öngörülebilir biyolojik fonksiyonlar üretmek için kullanılabilir, diyor Harvard'ın Wyss Institute for Biologically Inspired Engineering'den nöromühendis Haleh Fotowat.
Levin'in ekibi şimdi, anthrobotlara insan nöron hücreleri eklemeyi planlıyor, bu da nörobot çerçevesini tamamen insan bağlamına taşıyacak. Daha sonra, daha da koşullandırma ve yönlendirilmiş öğrenme yoluyla, bu canlı makineler - bombaları koklamak için eğitilmiş köpekler gibi - davranışlarını öngörülebilir şekillerde uyarlayabilecekler. "Umarız ki, onlara ne yapmak istiyorsanız öğretilebilir veya eğitilebilirler" diyor, University of Vermont'tan bilgisayar bilimcisi ve robotikçi Josh Bongard. Bongard, nörobot çalışmasına dahil değildi, ancak Levin'in sık sık işbirlikçisidir. Birlikte, biyobot ile ilgili teknolojileri ilerletmek için kâr amacı gütmeyen Institute for Computationally Designed Organisms ve ticari bir startup, Fauna Systems'i kurmuşlardır. Fauna CEO'su Naimish Patel'e göre, şirket ilk olarak su ürünleri yetiştiriciliği, atık su izleme ve kirletici algılama gibi ortamlarda xenobotları dağıtmayı hedefliyor. Bu teknolojinin birden fazla sinyali entegre etme yeteneği, ekosistem sağlığının erken bir okumasını sağlayabilir. Eğer xenobotlar stres faktörlerinin bir karışımına rastlarlarsa - örneğin, yüksek ağır metaller, pH değişiklikleri ve tarımsal akış izleri - kolektif hareket veya aktivite değişiklikleri, çevrede bir şeyin yanlış gittiğinin gerçek zamanlı bir sinyalini sağlayabilir. Bu fikrin öncülü, Polonya'dan geliyor, burada birçok şehir zaten su kalitesinin canlı gözetmenleri olarak taze su midyeleri kullanıyor ve bunlar, kirleticilere tepki olarak kabuklarını kapattıklarında sensörlerle donatılmışlardır. Xenobotlar, bu kavramı daha da ileriye taşıyabilir, Patel diyor, birden fazla çevresel ipucunu tek bir ölçülebilir davranışsal tepkiye entegre ederek daha büyük duyarlılık ve özgüllük sunabilir. Ve nörobotlar, sonunda, algılama ve hesaplama birleştirmeyi daha da sofistike bir alana itebilir, diye ekliyor.
Yorumlar (0)
Yorum yapmak için giriş yapın.
İlgili Haberler

Yol Çalışmaları Robotaksileri Durdurdu: Waymo Otoyol Seferlerini Askıya Aldı
4 days ago
Uber'den Sürpriz Dönüş: Otonom Araçlar Robotaksi Değil, Farklı Bir Rolde Geliyor
5 days ago
Dyson Spot+Scrub Ai İncelemesi: Premium Robot Paspas, Lekelerle Mücadelede Sınıfta Kaldı
5 days ago